(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||| Mathematica Syntax | kerr.yukterez.net | 22.06.2016 - 04.04.2019, Version 17 |||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
mt1 = {"StiffnessSwitching", Method-> {"ExplicitRungeKutta", Automatic}};
mt2 = {"EventLocator", "Event"-> (r[τ]-1001/1000 rA)};
mt3 = {"ImplicitRungeKutta", "DifferenceOrder"-> 20};
mt4 = {"EquationSimplification"-> "Residual"};
mt0 = Automatic;
mta = mt0; (* mt0: Speed, mt3: Accuracy *)
wp = MachinePrecision;
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 1) STARTBEDINGUNGEN EINGEBEN |||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
A = a; (* pseudosphärisch: A=0, kartesisch: A=a *)
crd = 1; (* Boyer-Lindquist: crd=1, Kerr-Schild: crd=2 *)
dsp = 1; (* Display Modus *)
tmax = 120; (* Eigenzeit *)
Tmax = 120; (* Koordinatenzeit *)
TMax = Min[Tmax, т[plunge-1*^-3]]; tMax = Min[tmax, plunge]; (* Integrationsende *)
r0 = 3; (* Startradius *)
r1 = 5; (* Endradius wenn v0=vr0=vr1 *)
θ0 = π/2; (* Breitengrad *)
φ0 = 0; (* Längengrad *)
a = 1; (* Spinparameter *)
v0 = 1; (* Anfangsgeschwindigkeit *)
α0 = 0; (* vertikaler Abschusswinkel *)
ψ0 = δp[r0, a]; (* Bahninklinationswinkel *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 2) GESCHWINDIGKEITS-, ENERGIE UND DREHIMPULSKOMPONENTEN ||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
vr0 = v0 Sin[α0]; (* radiale Geschwindigkeitskomponente *)
vθ0 = v0 Cos[α0] Sin[ψ0]; (* longitudinale Geschwindigkeitskomponente *)
vφ0 = v0 Cos[α0] Cos[ψ0]; (* latitudinale Geschwindigkeitskomponente *)
vrj[τ_]:=R'[τ]/Sqrt[Δi[τ]] Sqrt[Σi[τ] (1+μ v[τ]^2)];
vθj[τ_]:=Θ'[τ] Sqrt[Σi[τ] (1+μ v[τ]^2)];
vφBL[τ_]:=-((Sin[Θ[τ]] Sqrt[1+μ v[τ]^2] (-a^5 ε Cos[Θ[τ]]^2-a ε R[τ]^4+
a^2 Δi[τ] (xJ[τ] ε Cot[Θ[τ]]^2+Φ'[τ] Cos[Θ[τ]]^2 Σi[τ])+
R[τ]^2 (-a^3 ε (1+Cos[Θ[τ]]^2)+Δi[τ] (xJ[τ] ε Csc[Θ[τ]]^2+Φ'[τ] Σi[τ]))))/((a^2 Cos[Θ[τ]]^2+
R[τ]^2) (a^2 Sin[Θ[τ]]^2-Δi[τ]) Sqrt[Χi[τ]/Σi[τ]]));
vφKS[τ_]:=(j[v[τ]] Sin[Θ[τ]]^2 (2 a ε R[τ]-Φ'[τ] Δi[τ] Σi[τ]+
a Σi[τ] R'[τ]))/(Ыi[τ] (2 R[τ]-Σi[τ]))
vφj[τ_]:=If[crd==2, vφKS[τ], vφBL[τ]];
vtj[τ_]:=Sqrt[vrj[τ]^2+vθj[τ]^2+vφj[τ]^2];
vr[τ_]:=vrj[τ]/vtj[τ]*v[τ];
vθ[τ_]:=vθj[τ]/vtj[τ]*v[τ];
vφ[τ_]:=vφj[τ]/vtj[τ]*v[τ];
x0BL[A_] := Sqrt[r0^2+A^2] Sin[θ0] Cos[φ0]; (* Anfangskoordinaten *)
y0BL[A_] := Sqrt[r0^2+A^2] Sin[θ0] Sin[φ0];
z0[A_] := r0 Cos[θ0];
x0KS[A_] := ((r0 Cos[φ0]+A Sin[φ0]) Sin[θ0]);
y0KS[A_] := ((r0 Sin[φ0]-A Cos[φ0]) Sin[θ0]);
x0[A_] := If[crd==1, x0BL[A], x0KS[A]];
y0[A_] := If[crd==1, y0BL[A], y0KS[A]];
ε = Sqrt[δ Ξ/χ]/j[v0]+Lz ω0; (* Energie und Drehimpulskomponenten *)
Lz = vφ0 Ы/j[v0];
pθ0 = vθ0 Sqrt[Ξ]/j[v0];
pr0 = vr0 Sqrt[(Ξ/δ)/j[v0]^2];
Q = Simplify[Limit[pθ0^2+(Lz^2 Csc[ϑ]^2-a^2 (ε^2+μ)) Cos[ϑ]^2, ϑ->θ0]]; (* Carter Q *)
k = Q+Lz^2+a^2 (ε^2+μ); (* Carter k *)
μ = If[Abs[v0]==1, 0, -1]; (* Baryon: μ=-1, Photon: μ=0 *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 3) RADIUS NACH GESCHWINDIGKEIT UND VICE VERSA ||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
rPro = 2 (1+Cos[2/3 ArcCos[-a]]); (* prograder Photonenorbitradius *)
rRet = 2 (1+Cos[2/3 ArcCos[+a]]); (* retrograder Photonenorbitradius *)
rTeo = 1+2 Sqrt[1-a^3/3] Cos[ArcCos[(1-a^2)/(1-a^2/3)^(3/2)]/3];
(* ISCO *)
isco = rISCO/.Solve[0 == rISCO (6 rISCO-rISCO^2+3 a^2)-8 a rISCO^(3/2) && rISCO>=rA, rISCO][[1]];
δp[r_,a_] := Quiet[δi/.NSolve[(a^4(-1+r)+2(-3+r)r^4+a^2r(6+r(-5+3 r))+ (* Eq. Ink. Winkel *)
4a Sqrt[a^2+(-2+r)r](a^2+3 r^2)Cos[δi]-a^2(3+r)(a^2+(-2+r)r)Cos[2δi])/(2r(a^2+
(-2+r)r)(r^3+a^2(2+r)))==0&&δi<=π&&δi>=0,δi][[1]]];
vPro = (a^2-2a Sqrt[r0]+r0^2)/(Sqrt[a^2+(-2+r0)r0](a+r0^(3/2)));(* Kreisgeschwindigkeit + *)
vRet = (a^2+2a Sqrt[r0]+r0^2)/(Sqrt[a^2+(-2+r0)r0](a-r0^(3/2)));(* Kreisgeschwindigkeit - *)
vr1 = \[Sqrt](((a^2+(-2+r0) r0) (r0^2+a^2 Cos[θ0]^2) ((a^2+r1^2)^2-a^2 (a^2+(-2+
r1) r1) Sin[θ0]^2) (-1+((a^2+(-2+r1) r1) (r1^2+a^2 Cos[θ0]^2) (-(a^2+r0^2)^2+
a^2 (a^2+(-2+r0) r0) Sin[θ0]^2))/((a^2+(-2+r0) r0) (r0^2+a^2 Cos[θ0]^2) (-(a^2+
r1^2)^2+a^2 (a^2+(-2+r1) r1) Sin[θ0]^2))))/((a^2+(-2+r1) r1) (r1^2+
a^2 Cos[θ0]^2) ((a^2+r0^2)^2-a^2 (a^2+(-2+r0) r0) Sin[θ0]^2))); (* v Flucht von r0 bis r1 *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 4) HORIZONTE UND ERGOSPHÄREN RADIEN ||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
rE = 1+Sqrt[1-a^2 Cos[θ]^2]; (* äußere Ergosphäre *)
rG = 1-Sqrt[1-a^2 Cos[θ]^2]; (* innere Ergosphäre *)
rA = 1+Sqrt[1-a^2]; (* äußerer Horizont *)
rI = 1-Sqrt[1-a^2]; (* innerer Horizont *)
RE[A_, w1_, w2_] := Xyz[xyZ[
{Sqrt[rE^2+A^2] Sin[θ] Cos[φ], Sqrt[rE^2+A^2] Sin[θ] Sin[φ], rE Cos[θ]}, w1], w2];
RG[A_, w1_, w2_] := Xyz[xyZ[
{Sqrt[rG^2+A^2] Sin[θ] Cos[φ], Sqrt[rG^2+A^2] Sin[θ] Sin[φ], rG Cos[θ]}, w1], w2];
RA[A_, w1_, w2_] := Xyz[xyZ[
{Sqrt[rA^2+A^2] Sin[θ] Cos[φ], Sqrt[rA^2+A^2] Sin[θ] Sin[φ], rA Cos[θ]}, w1], w2];
RI[A_, w1_, w2_] := Xyz[xyZ[
{Sqrt[rI^2+A^2] Sin[θ] Cos[φ], Sqrt[rI^2+A^2] Sin[θ] Sin[φ], rI Cos[θ]}, w1], w2];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 5) HORIZONTE UND ERGOSPHÄREN PLOT ||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
horizons[A_, mesh_, w1_, w2_] := Show[
ParametricPlot3D[RE[A, w1, w2], {φ, 0, 2 π}, {θ, 0, π},
Mesh -> mesh, PlotPoints -> plp, PlotStyle -> Directive[Blue, Opacity[0.10]]],
ParametricPlot3D[RA[A, w1, w2], {φ, 0, 2 π}, {θ, 0, π},
Mesh -> None, PlotPoints -> plp, PlotStyle -> Directive[Cyan, Opacity[0.15]]],
ParametricPlot3D[RI[A, w1, w2], {φ, 0, 2 π}, {θ, 0, π},
Mesh -> None, PlotPoints -> plp, PlotStyle -> Directive[Red, Opacity[0.25]]],
ParametricPlot3D[RG[A, w1, w2], {φ, 0, 2 π}, {θ, 0, π},
Mesh -> None, PlotPoints -> plp, PlotStyle -> Directive[Red, Opacity[0.35]]]];
BLKS := Grid[{{horizons[a, 35, 0, 0], horizons[0, 35, 0, 0]}}];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 6) FUNKTIONEN ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
j[v_] := Sqrt[1+μ v^2]; (* Lorentzfaktor *)
mirr = Sqrt[(Sqrt[1-a^2]+1)/2]; (* irreduzible Masse *)
я = Sqrt[Χ/Σ]Sin[θ[τ]]; (* axialer Umfangsradius *)
яi[τ_] := Sqrt[Χi[τ]/Σi[τ]]Sin[Θ[τ]];
Ы = Sqrt[χ/Ξ]Sin[θ0];
Ыi[τ_] := Sqrt[Χi[τ]/Σi[τ]]Sin[Θ[τ]];
ц = 2r[τ]/Σ; ц0=2r0/Ξ;
Σ = r[τ]^2+a^2 Cos[θ[τ]]^2; (* poloidialer Umfangsradius *)
Σi[τ_] := R[τ]^2+a^2 Cos[Θ[τ]]^2;
Ξ = r0^2+a^2 Cos[θ0]^2;
Δ = r[τ]^2-2r[τ]+a^2;
Δi[τ_] := R[τ]^2-2R[τ]+a^2;
δ = r0^2-2r0+a^2;
Χ = (r[τ]^2+a^2)^2-a^2 Sin[θ[τ]]^2 Δ;
Χi[τ_] := (R[τ]^2+a^2)^2-a^2 Sin[Θ[τ]]^2 Δi[τ];
χ = (r0^2+a^2)^2-a^2 Sin[θ0]^2 δ;
XJ = a Sin[θ[τ]]^2;
xJ[τ_] := a Sin[Θ[τ]]^2;
Xj = a Sin[θ0]^2;
т[τ_] := Evaluate[t[τ]/.sol][[1]]; (* Koordinatenzeit nach Eigenzeit *)
д[ξ_] := Quiet[Ξ /.FindRoot[т[Ξ]-ξ, {Ξ, 0}]]; (* Eigenzeit nach Koordinatenzeit *)
T := Quiet[д[tk]];
ю[τ_] := Evaluate[t'[τ]/.sol][[1]];
γ[τ_] := If[μ==0, "Infinity", ю[τ]]; (* totale ZD *)
R[τ_] := Evaluate[r[τ]/.sol][[1]]; (* Boyer-Lindquist Radius *)
Φ[τ_] := Evaluate[φ[τ]/.sol][[1]];
Θ[τ_] := Evaluate[θ[τ]/.sol][[1]];
ß[τ_] := Re[Sqrt[X'[τ]^2+Y'[τ]^2+Z'[τ]^2 ]/ю[τ]];
gs[τ_] := (2 (R[τ]^2-a^2 Cos[Θ[τ]]^2) Sqrt[((a^2+R[τ]^2)^2-a^2 (a^2+(R[τ]- (* Gravitation *)
2) R[τ]) Sin[Θ[τ]]^2)/(a^2+2 R[τ]^2+a^2 Cos[2 Θ[τ]])^2])/(R[τ]^2+a^2 Cos[Θ[τ]]^2)^2;
ς[τ_] := Sqrt[Χi[τ]/Δi[τ]/Σi[τ]]; ς0 = Sqrt[χ/δ/Ξ]; (* gravitative ZD *)
ω[τ_] := 2R[τ] a/Χi[τ]; ω0 = 2r0 a/χ; ωd=2r[τ] a/Χ; (* Frame Dragging *)
Ω[τ_] := ω[τ] Sqrt[X[τ]^2+Y[τ]^2]; (* Frame Dragging beobachtete Geschwindigkeit *)
й[τ_] := ω[τ] яi[τ] ς[τ]; й0 = ω0 Ы ς0; (* Frame Dragging lokale Geschwindigkeit *)
ж[τ_] := Sqrt[ς[τ]^2-1]/ς[τ]; ж0 = Sqrt[ς0^2-1]/ς0; (* Fluchtgeschwindigkeit *)
vEsc = ж0;
vd[τ_] := Abs[-((\[Sqrt](-a^4(ε-Lz ωd)^2-2 a^2r[τ]^2 (ε-Lz ωd)^2-
r[τ]^4(ε-Lz ωd)^2+Δ(Σ+a^2 Sin[θ[τ]]^2 (ε-
Lz ωd)^2)))/(Sqrt[-(a^2+r[τ]^2)^2+
a^2 Sin[θ[τ]]^2 Δ](ε - Lz ωd)))];
v[τ_] := If[μ==0, 1, Evaluate[vlt'[τ]/.sol][[1]]]; (* lokale Dreiergeschwindigkeit *)
dst[τ_] := Evaluate[str[τ]/.sol][[1]]; (* Strecke *)
pΘ[τ_] := Evaluate[pθ[τ] /. sol][[1]]; pΘks[τ_] := Σi[τ] Θ'[τ]; (* Impuls *)
pR[τ_] := Evaluate[pr[τ] /. sol][[1]]; pRks[τ_] := Σi[τ]/Δi[τ] R'[τ];
sh[τ_] := Re[Sqrt[ß[τ]^2-Ω[τ]^2]];
epot[τ_] := ε+μ-ekin[τ]; (* potentielle Energie *)
ekin[τ_] := If[μ==0, ς[τ], 1/Sqrt[1-v[τ]^2]-1]; (* kinetische Energie *)
(* beobachtete Inklination *)
ink0 := б/. Solve[Z'[0]/ю[0] Cos[б]==-Y'[0]/ю[0] Sin[б]&&б>0&&б<2π&&б<δp[r0, a], б][[1]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 7) DIFFERENTIALGLEICHUNG |||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
dp= Style[\!\(\*SuperscriptBox[\(Y\),\(Y\)]\), White]; n0[z_] := Chop[Re[N[Simplify[z]]]];
(* Boyer-Lindquist-Koordinaten *)
pr2τ[τ_] := 1/(Σ Δ) (((r[τ]^2+a^2)μ-k)(r[τ]-1)+r[τ] Δ μ+2r[τ](r[τ]^2+a^2) ε^2-
2 a ε Lz)-(2pr[τ]^2 (r[τ]-1))/Σ;
pθ2τ[τ_] := (Sin[θ[τ]]Cos[θ[τ]])/Σ (Lz^2/Sin[θ[τ]]^4-a^2 (ε^2+μ));
DG1={
t'[τ] == ε+(2r[τ](r[τ]^2+a^2)ε-2 a r[τ] Lz)/(Σ Δ),
t[0] == 0,
r'[τ] == (pr[τ] Δ)/Σ,
r[0] == r0,
θ'[τ] == pθ[τ]/Σ,
θ[0] == θ0,
φ'[τ] == (2 a r[τ] ε+(Σ-2r[τ])Lz Csc[θ[τ]]^2)/(Σ Δ),
φ[0] == φ0,
pr'[τ] == pr2τ[τ],
pr[0] == pr0,
pθ'[τ] == pθ2τ[τ],
pθ[0] == pθ0,
str'[τ]== vd[τ]/Max[1*^-16, Abs[Sqrt[1-vd[τ]^2]]],
str[0] == 0,
vlt'[τ]== vd[τ],
vlt[0] == 0
};
(* Kerr-Schild-Koordinaten *)
dr = (pr0 δ)/Ξ; dθ=pθ0/Ξ;
dφ = (2a r0 ε+(Ξ-2r0)Lz Csc[θ0]^2)/(Ξ δ)+dr a/δ;
dΦ = If[θ0==0, 0, If[θ0==π, 0, dφ]];
φk = φ0+cns/.FindRoot[Sqrt[r0^2+a^2] Cos[φ0+cns]-((r0 Cos[φ0]+a Sin[φ0])),{cns,1}];
DG2={
t''[τ] == (2 ((a^4 Cos[θ[τ]]^4+a^2 Cos[θ[τ]]^2 r[τ]-r[τ]^3-r[τ]^4) r'[τ]^2+r[τ] ((a^2 Cos[θ[τ]]^2-r[τ]^2) t'[τ]^2+r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 θ'[τ]^2-2 a^3 Cos[θ[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[θ[τ]]^3 θ'[τ] φ'[τ]+Sin[θ[τ]]^2 (r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2+a^2 (a^2 Cos[θ[τ]]^2-r[τ]^2) Sin[θ[τ]]^2) φ'[τ]^2+a t'[τ] (a (2 a^2 Cos[θ[τ]]^3 Sin[θ[τ]]+r[τ]^2 Sin[2 θ[τ]]) θ'[τ]+2 (-a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[θ[τ]]^2 φ'[τ]))+r'[τ] ((a^4 Cos[θ[τ]]^4+2 a^2 Cos[θ[τ]]^2 r[τ]-2 r[τ]^3-r[τ]^4) t'[τ]+a (a r[τ] (2 a^2 Cos[θ[τ]]^3 Sin[θ[τ]]+r[τ]^2 Sin[2 θ[τ]]) θ'[τ]+(-a^4 Cos[θ[τ]]^4-2 a^2 Cos[θ[τ]]^2 r[τ]+2 r[τ]^3+r[τ]^4) Sin[θ[τ]]^2 φ'[τ]))))/(a^2 Cos[θ[τ]]^2+r[τ]^2)^3,
t'[0] == Limit[(ц0 (-dr+a Sin[θ1]^2 dΦ))/(-1+ц0)+\[Sqrt]((1/((-1+ц0)^2 Ξ))(Ξ (dr^2+(-1+ц0) (μ-Ξ dθ^2))+Sin[θ1]^2 dΦ (-2a Ξ dr-(-1+ц0) χ dΦ+ц0^2 a^2 Ξ Sin[θ1]^2 dΦ))), θ1->θ0],
t[0] == 0,
r''[τ] == (-8 (a^2 Cos[θ[τ]]^2-r[τ]^2) (a^2 Cos[2 θ[τ]]+r[τ] (2+r[τ])) r'[τ]^2+4 r'[τ] (4 (a^2 Cos[θ[τ]]^2-r[τ]^2) (-2 r[τ]+a^2 Sin[θ[τ]]^2) t'[τ]+2 a^2 (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 Sin[2 θ[τ]] θ'[τ]-a Sin[θ[τ]]^2 (2 r[τ] (a^2 Cos[θ[τ]]^2 (-4+a^2+a^2 Cos[2 θ[τ]])+2 r[τ] ((2+a^2+a^2 Cos[2 θ[τ]]) r[τ]+r[τ]^3-a^2 Sin[θ[τ]]^2))+a^4 Sin[2 θ[τ]]^2) φ'[τ])+2 (a^2+(-2+r[τ]) r[τ]) (4 (a^2 Cos[θ[τ]]^2-r[τ]^2) t'[τ]^2+4 r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 θ'[τ]^2+8 a (-a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[θ[τ]]^2 t'[τ] φ'[τ]+Sin[θ[τ]]^2 (4 r[τ] ((a^2 Cos[θ[τ]]^2+r[τ]^2)^2-a^2 r[τ] Sin[θ[τ]]^2)+a^4 Sin[2 θ[τ]]^2) φ'[τ]^2))/(8 (a^2 Cos[θ[τ]]^2+r[τ]^2)^3),
r'[0] == dr,
r[0] == r0,
θ''[τ] == (4 a^2 r[τ] Sin[2 θ[τ]] (r'[τ]+t'[τ])^2-8 r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 r'[τ] θ'[τ]+2 a^2 (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 Sin[2 θ[τ]] θ'[τ]^2-8 a ((Cos[θ[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 Sin[θ[τ]]+r[τ] (a^2+r[τ]^2) Sin[2 θ[τ]]) r'[τ]+r[τ] (a^2+r[τ]^2) Sin[2 θ[τ]] t'[τ]) φ'[τ]+(2 a^6 Cos[θ[τ]]^4+r[τ] (a^4 Cos[θ[τ]]^2 (5+Cos[2 θ[τ]]) r[τ]+2 a^2 (2+Cos[2 θ[τ]]) r[τ]^3+2 r[τ]^5+2 a^2 (a^2 (3+Cos[2 θ[τ]])+4 r[τ]^2) Sin[θ[τ]]^2)) Sin[2 θ[τ]] φ'[τ]^2)/(4 (a^2 Cos[θ[τ]]^2+r[τ]^2)^3),
θ'[0] == dθ,
θ[0] == θ0,
φ''[τ] == If[θ[τ]==0, 0, (4 (a^3 Cos[θ[τ]]^2-a r[τ]^2) r'[τ]^2+4 (a^3 Cos[θ[τ]]^2-a r[τ]^2) t'[τ]^2+4 a r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 θ'[τ]^2-8 (a^2 Cos[θ[τ]]^2+r[τ]^2) (Cot[θ[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2+a^2 r[τ] Sin[2 θ[τ]]) θ'[τ] φ'[τ]+a Sin[θ[τ]]^2 (4 r[τ] ((a^2 Cos[θ[τ]]^2+r[τ]^2)^2-a^2 r[τ] Sin[θ[τ]]^2)+a^4 Sin[2 θ[τ]]^2) φ'[τ]^2+8 a t'[τ] (2 Cot[θ[τ]] r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2) θ'[τ]+a (-a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[θ[τ]]^2 φ'[τ])+8 r'[τ] ((a^3 Cos[θ[τ]]^2-a r[τ]^2) t'[τ]+a Cot[θ[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2) (a^2 Cos[θ[τ]]^2+r[τ] (2+r[τ])) θ'[τ]-(r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2+a^2 (a^2 Cos[θ[τ]]^2-r[τ]^2) Sin[θ[τ]]^2) φ'[τ]))/(4 (a^2 Cos[θ[τ]]^2+r[τ]^2)^3)],
φ'[0] == dΦ,
φ[0] == φk,
str'[τ]== vd[τ]/Max[1*^-16, Abs[Sqrt[1-vd[τ]^2]]],
str[0] == 0,
vlt'[τ]== vd[τ],
vlt[0] == 0
};
DGL = If[crd==1, DG1, DG2];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 8) INTEGRATION |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
sol=
NDSolve[DGL, {t, r, θ, φ, str, vlt, pr, pθ}, {τ, 0, tmax},
WorkingPrecision-> wp,
MaxSteps-> Infinity,
Method-> mta,
InterpolationOrder-> All,
StepMonitor :> (laststep=plunge; plunge=τ;
stepsize=plunge-laststep;), Method->{"EventLocator",
"Event" :> (If[stepsize<1*^-4, 0, 1])}];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 9) KOORDINATEN |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
XBL[τ_] := Evaluate[Sqrt[r[τ]^2+a^2] Sin[θ[τ]] Cos[φ[τ]]/.sol][[1]];
YBL[τ_] := Evaluate[Sqrt[r[τ]^2+a^2] Sin[θ[τ]] Sin[φ[τ]]/.sol][[1]];
Z[τ_] := Evaluate[r[τ] Cos[θ[τ]]/.sol][[1]];
XKS[τ_] := Evaluate[((r[τ] Cos[φ[τ]]+a Sin[φ[τ]]) Sin[θ[τ]])/.sol][[1]];
YKS[τ_] := Evaluate[((r[τ] Sin[φ[τ]]-a Cos[φ[τ]]) Sin[θ[τ]])/.sol][[1]];
X[τ_] := If[crd==1, XBL[τ], XKS[τ]];
Y[τ_] := If[crd==1, YBL[τ], YKS[τ]];
xBL[τ_] := Evaluate[Sqrt[r[τ]^2+A^2] Sin[θ[τ]] Cos[φ[τ]]/.sol][[1]];
yBL[τ_] := Evaluate[Sqrt[r[τ]^2+A^2] Sin[θ[τ]] Sin[φ[τ]]/.sol][[1]];
z[τ_] := Z[τ];
xKS[τ_] := Evaluate[((r[τ] Cos[φ[τ]]+A Sin[φ[τ]]) Sin[θ[τ]])/.sol][[1]];
yKS[τ_] := Evaluate[((r[τ] Sin[φ[τ]]-A Cos[φ[τ]]) Sin[θ[τ]])/.sol][[1]];
x[τ_] := If[crd==1, xBL[τ], xKS[τ]];
y[τ_] := If[crd==1, yBL[τ], yKS[τ]];
XYZ[τ_] := Sqrt[X[τ]^2+Y[τ]^2+Z[τ]^2]; XY[τ_] := Sqrt[X[τ]^2+Y[τ]^2]; (* kartesisches R *)
Xyz[{x_, y_, z_}, α_] := {x Cos[α]-y Sin[α], x Sin[α]+y Cos[α], z}; (* Rotationsmatrix *)
xYz[{x_, y_, z_}, β_] := {x Cos[β]+z Sin[β], y, z Cos[β]-x Sin[β]};
xyZ[{x_, y_, z_}, ψ_] := {x, y Cos[ψ]-z Sin[ψ], y Sin[ψ]+z Cos[ψ]};
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 10) PLOT EINSTELLUNGEN |||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
PR = 1.2 r1; (* Plot Range *)
d1 = 2; (* Schweiflänge *)
plp = 50; (* Flächenplot Details *)
Plp = Automatic; (* Kurven Details *)
Mrec = 100; (* Parametric Plot Subdivisionen *)
mrec = 10;
imgsize = 380; (* Bildgröße *)
w1l = 0; (* Startperspektiven, Winkel *)
w2l = 0;
w1r = 0;
w2r = 0;
s[text_]:=Style[text, FontFamily->"Consolas", FontSize->11]; (* Anzeigestil *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 11) PLOT NACH EIGENZEIT ||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
display[T_] := Grid[{
{If[μ==0, s[" affineP"], s[" τ propr"]], " = ", s[n0[tp]], s["GM/c³"], s[dp]},
{s[" t coord"], " = ", s[n0[т[tp]]], s["GM/c³"], s[dp]},
(* {s[" т coord"], " = ", s[n0[т[tp]+Sign[1.5-dsp] 2 NIntegrate[R[Ti]/(R[Ti]^2-2 R[Ti]+a^2),{Ti,0,T}]]], s["GM/c³"], s[dp]}, *)
{s[" ṫ total"], " = ", s[n0[If[dsp==1, ю[tp]-2 If[crd==1, 0, R'[tp] R[tp]/(R[tp]^2-2 R[tp]+a^2)], ю[T]]]], s[If[dsp==1, "dt/dτ", "dт/dτ"]], s[dp]},
{s[" ς gravt"], " = ", s[n0[ς[tp]]], s["dt/dτ"], s[dp]},
{s[" γ kinet"], " = ", If[μ==0, s[n0[ς[tp]]], s[n0[1/Sqrt[1-v[tp]^2]]]], s["dt/dτ"], s[dp]},
{s[" R carts"], " = ", s[n0[XYZ[tp]]], s["GM/c²"], s[dp]},
{s[" x carts"], " = ", s[n0[X[tp]]], s["GM/c²"], s[dp]},
{s[" y carts"], " = ", s[n0[Y[tp]]], s["GM/c²"], s[dp]},
{s[" z carts"], " = ", s[n0[Z[tp]]], s["GM/c²"], s[dp]},
{s[" s dstnc"], " = ", s[n0[dst[tp]]], s["GM/c²"], s[dp]},
{s[" r coord"], " = ", s[n0[R[tp]]], s["GM/c²"], s[dp]},
{s[" φ longd"], " = ", s[n0[Φ[tp] 180/π]], s["deg"], s[dp]},
{s[" θ lattd"], " = ", s[n0[Θ[tp] 180/π]], s["deg"], s[dp]},
{s[" d¹r/dτ¹"], " = ", s[n0[R'[tp]]], s["c"], s[dp]},
{s[" d¹φ/dτ¹"], " = ", s[n0[Φ'[tp]]], s["c\.b3/G/M"], s[dp]},
{s[" d¹θ/dτ¹"], " = ", s[n0[Θ'[tp]]], s["c\.b3/G/M"], s[dp]},
{s[" d\.b2r/dτ\.b2"], " = ", s[n0[R''[tp]]], s["c⁴/G/M"], s[dp]},
{s[" d\.b2φ/dτ\.b2"], " = ", s[n0[Φ''[tp]]], s["c⁶/G\.b2/M\.b2"], s[dp]},
{s[" d\.b2θ/dτ\.b2"], " = ", s[n0[Θ''[tp]]], s["c⁶/G\.b2/M\.b2"], s[dp]},
{s[" a SpinP"], " = ", s[n0[a]], s["GM²/c"], s[dp]},
{s[" Ř crc.φ"], " = ", s[n0[яi[tp]]], s["GM/c²"], s[dp]},
{s[" Σ crc.θ"], " = ", s[n0[Sqrt[Σi[tp]]]], s["GM/c²"], s[dp]},
{s[" M irred"], " = ", s[N[mirr]], s["M"], s[dp]},
{s[" E kinet"], " = ", s[n0[ekin[tp]]], s["mc²"], s[dp]},
{s[" E poten"], " = ", s[n0[epot[tp]]], s["mc²"], s[dp]},
{s[" E total"], " = ", s[n0[ε]], s["mc²"], s[dp]},
{s[" CarterQ"], " = ", s[n0[Q]], s["GMm/c"], s[dp]},
{s[" L axial"], " = ", s[n0[Lz]], s["GMm/c"], s[dp]},
{s[" L polar"], " = ", s[n0[If[crd==1, pΘ[T], pΘks[T]]]], s["GMm/c"], s[dp]},
{s[" p r.mom"], " = ", s[n0[If[crd==1, pR[tp], pRks[tp]]]], s["mc"], s[dp]},
{s[" ω fdrag"], " = ", s[n0[ω[tp]]], s["c³/G/M"], s[dp]},
{s[" v fdrag"], " = ", s[n0[й[tp]]], s["c"], s[dp]},
{s[" Ω fdrag"], " = ", s[n0[Ω[tp]]], s["c"], s[dp]},
{s[" v propr"], " = ", s[n0[v[tp]/Sqrt[1-v[tp]^2]]], s["c"], s[dp]},
{s[" v escpe"], " = ", s[n0[ж[tp]]], s["c"], s[dp]},
{s[" v obsvd"], " = ", s[n0[ß[tp]]], s["c"], s[dp]},
{s[" v r,loc"], " = ", s[n0[vr[tp]]], s["c"], s[dp]},
{s[" v θ,loc"], " = ", s[n0[vθ[tp]]], s["c"], s[dp]},
{s[" v φ,loc"], " = ", s[n0[vφ[tp]]], s["c"], s[dp]},
{s[" v local"], " = ", s[n0[v[tp]]], s["c"], s[dp]},
{s[" "], s[" "], s[" "], s[" "]}},
Alignment-> Left, Spacings-> {0, 0}];
plot1b[{xx_, yy_, zz_, tk_, w1_, w2_}] := (* Animation *)
Show[
Graphics3D[{
{PointSize[0.011], Red, Point[
Xyz[xyZ[{x[tp], y[tp], z[tp]}, w1], w2]]}},
ImageSize-> imgsize,
PlotRange-> {
{-(2 Sign[Abs[xx]]+1) PR, +(2 Sign[Abs[xx]]+1) PR},
{-(2 Sign[Abs[yy]]+1) PR, +(2 Sign[Abs[yy]]+1) PR},
{-(2 Sign[Abs[zz]]+1) PR, +(2 Sign[Abs[zz]]+1) PR}
},
SphericalRegion->False,
ImagePadding-> 1],
If[a==0,
Graphics3D[{Gray, Opacity[0.25], Sphere[{0,0,0}, 2]}],
horizons[A, None, w1, w2]],
If[A==0, {}, If[a==0, {}, ParametricPlot3D[
Xyz[xyZ[{
Sin[prm] a,
Cos[prm] a,
0}, w1], w2],
{prm, 0, 2π},
PlotStyle -> {Thickness[0.005], Orange}]]],
If[crd==1, If[a==0, {},
Graphics3D[{{PointSize[0.009], Purple, Point[
Xyz[xyZ[{
Sin[-φ0-ω0 т[tp]+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ω0 т[tp]+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2]]}}]],
If[a==0, {},
Graphics3D[{{PointSize[0.009], Purple, Point[
Xyz[xyZ[{
Sin[-φ0-ц0 a Ξ/χ т[tp]+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ц0 a Ξ/χ т[tp]+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2]]}}]]],
If[crd==1, If[tk==0, {}, If[a==0, {},
ParametricPlot3D[
Xyz[xyZ[{
Sin[-φ0-ω0 т[tt]+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ω0 т[tt]+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2],
{tt, Max[0, д[т[tp]-1/2 π/ω0]], tp},
PlotStyle -> {Thickness[0.001], Dashed, Purple},
PlotPoints-> Automatic,
MaxRecursion-> 12]]],
If[tk==0, {}, If[a==0, {},
ParametricPlot3D[
Xyz[xyZ[{
Sin[-φ0-ц0 a Ξ/χ т[tt]+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ц0 a Ξ/χ т[tt]+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2],
{tt, Max[0, д[т[tp]-1/2 π/ω0]], tp},
PlotStyle -> {Thickness[0.001], Dashed, Purple},
PlotPoints-> Automatic,
MaxRecursion-> 12]]]],
If[tk==0, {},
Block[{$RecursionLimit = Mrec},
ParametricPlot3D[
Xyz[xyZ[{x[tt], y[tt], z[tt]}, w1], w2], {tt, If[tp<0, Min[0, tp+d1], Max[0, tp-d1]], tp},
PlotStyle-> {Thickness[0.004]},
ColorFunction-> Function[{x, y, z, t},
Hue[0, 1, 0.5, If[tp<0, Max[Min[(+tp+(-t+d1))/d1, 1], 0], Max[Min[(-tp+(t+d1))/d1, 1], 0]]]],
ColorFunctionScaling-> False,
PlotPoints-> Automatic,
MaxRecursion-> mrec]]],
If[tk==0, {},
Block[{$RecursionLimit = Mrec},
ParametricPlot3D[
Xyz[xyZ[{x[tt], y[tt], z[tt]}, w1], w2], {tt, 0, If[tp<0, Min[-1*^-16, tp+d1/3], Max[1*^-16, tp-d1/3]]},
PlotStyle-> {Thickness[0.004], Opacity[0.6], Darker@Gray},
PlotPoints-> Plp,
MaxRecursion-> mrec]]],
ViewPoint-> {xx, yy, zz}];
Quiet[Do[
Print[Rasterize[Grid[{{
plot1b[{0, -Infinity, 0, tp, w1l, w2l}],
plot1b[{0, 0, +Infinity, tp, w1r, w2r}],
display[tp]
}, {" ", " ", " "}
}, Alignment->Left]]],
{tp, 0, tMax, tMax/1}]]
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 12) PLOT NACH KOORDINATENZEIT ||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
display[T_] := Grid[{
{s[" t coord"], " = ", s[n0[tk]], s["GM/c³"], s[dp]},
(* {s[" т coord"], " = ", s[n0[tk+Sign[1.5-dsp] 2 NIntegrate[R[Ti]/(R[Ti]^2-2 R[Ti]+a^2),{Ti,0,T}]]], s["GM/c³"], s[dp]}, *)
{If[μ==0, s[" affineP"], s[" τ propr"]], " = ", s[n0[T]], s["GM/c³"], s[dp]},
{s[" ṫ total"], " = ", s[n0[If[dsp==1, ю[T]-2 If[crd==1, 0, R'[T] R[T]/(R[T]^2-2 R[T]+a^2)], ю[T]]]], s[If[dsp==1, "dt/dτ", "dт/dτ"]], s[dp]},
{s[" ς gravt"], " = ", s[n0[ς[T]]], s["dt/dτ"], s[dp]},
{s[" γ kinet"], " = ", If[μ==0, s[n0[ς[T]]], s[n0[1/Sqrt[1-v[T]^2]]]], s["dt/dτ"], s[dp]},
{s[" R carts"], " = ", s[n0[XYZ[T]]], s["GM/c²"], s[dp]},
{s[" x carts"], " = ", s[n0[X[T]]], s["GM/c²"], s[dp]},
{s[" y carts"], " = ", s[n0[Y[T]]], s["GM/c²"], s[dp]},
{s[" z carts"], " = ", s[n0[Z[T]]], s["GM/c²"], s[dp]},
{s[" s dstnc"], " = ", s[n0[dst[T]]], s["GM/c²"], s[dp]},
{s[" r coord"], " = ", s[n0[R[T]]], s["GM/c²"], s[dp]},
{s[" φ longd"], " = ", s[n0[Φ[T] 180/π]], s["deg"], s[dp]},
{s[" θ lattd"], " = ", s[n0[Θ[T] 180/π]], s["deg"], s[dp]},
{s[" d¹r/dτ¹"], " = ", s[n0[R'[T]]], s["c"], s[dp]},
{s[" d¹φ/dτ¹"], " = ", s[n0[Φ'[T]]], s["c\.b3/G/M"], s[dp]},
{s[" d¹θ/dτ¹"], " = ", s[n0[Θ'[T]]], s["c\.b3/G/M"], s[dp]},
{s[" d\.b2r/dτ\.b2"], " = ", s[n0[R''[T]]], s["c⁴/G/M"], s[dp]},
{s[" d\.b2φ/dτ\.b2"], " = ", s[n0[Φ''[T]]], s["c⁶/G\.b2/M\.b2"], s[dp]},
{s[" d\.b2θ/dτ\.b2"], " = ", s[n0[Θ''[T]]], s["c⁶/G\.b2/M\.b2"], s[dp]},
{s[" a SpinP"], " = ", s[n0[a]], s["GM²/c"], s[dp]},
{s[" Ř crc.φ"], " = ", s[n0[яi[T]]], s["GM/c²"], s[dp]},
{s[" Σ crc.θ"], " = ", s[n0[Sqrt[Σi[T]]]], s["GM/c²"], s[dp]},
{s[" M irred"], " = ", s[N[mirr]], s["M"], s[dp]},
{s[" E kinet"], " = ", s[n0[ekin[T]]], s["mc²"], s[dp]},
{s[" E poten"], " = ", s[n0[epot[T]]], s["mc²"], s[dp]},
{s[" E total"], " = ", s[n0[ε]], s["mc²"], s[dp]},
{s[" CarterQ"], " = ", s[n0[Q]], s["GMm/c"], s[dp]},
{s[" L axial"], " = ", s[n0[Lz]], s["GMm/c"], s[dp]},
{s[" L polar"], " = ", s[n0[If[crd==1, pΘ[T], pΘks[T]]]], s["GMm/c"], s[dp]},
{s[" p r.mom"], " = ", s[n0[If[crd==1, pR[T], pRks[T]]]], s["mc"], s[dp]},
{s[" ω fdrag"], " = ", s[n0[Abs[ω[T]]]], s["c³/G/M"], s[dp]},
{s[" v fdrag"], " = ", s[n0[Abs[й[T]]]], s["c"], s[dp]},
{s[" Ω fdrag"], " = ", s[n0[Abs[Ω[T]]]], s["c"], s[dp]},
{s[" v propr"], " = ", s[n0[v[T]/Sqrt[1-v[T]^2]]], s["c"], s[dp]},
{s[" v escpe"], " = ", s[n0[ж[T]]], s["c"], s[dp]},
{s[" v obsvd"], " = ", s[n0[ß[T]]], s["c"], s[dp]},
{s[" v r,loc"], " = ", s[n0[vr[T]]], s["c"], s[dp]},
{s[" v θ,loc"], " = ", s[n0[vθ[T]]], s["c"], s[dp]},
{s[" v φ,loc"], " = ", s[n0[vφ[T]]], s["c"], s[dp]},
{s[" v local"], " = ", s[n0[v[T]]], s["c"], s[dp]},
{s[" "], s[" "], s[" "], s[" "]}},
Alignment-> Left, Spacings-> {0, 0}];
plot1a[{xx_, yy_, zz_, tk_, w1_, w2_}]:= (* Animation *)
Show[
Graphics3D[{
{PointSize[0.011], Red, Point[
Xyz[xyZ[{x[T], y[T], z[T]}, w1], w2]]}},
ImageSize-> imgsize,
PlotRange-> {
{-(2 Sign[Abs[xx]]+1) PR, +(2 Sign[Abs[xx]]+1) PR},
{-(2 Sign[Abs[yy]]+1) PR, +(2 Sign[Abs[yy]]+1) PR},
{-(2 Sign[Abs[zz]]+1) PR, +(2 Sign[Abs[zz]]+1) PR}
},
SphericalRegion->False,
ImagePadding-> 1],
If[a==0,
Graphics3D[{Gray, Opacity[0.25], Sphere[{0,0,0}, 2]}],
horizons[A, None, w1, w2]],
If[A==0, {}, If[a==0, {}, ParametricPlot3D[
Xyz[xyZ[{
Sin[prm] a,
Cos[prm] a,
0}, w1], w2],
{prm, 0, 2π},
PlotStyle -> {Thickness[0.005], Orange}]]],
If[crd==1, If[a==0, {},
Graphics3D[{{PointSize[0.009], Purple, Point[
Xyz[xyZ[{
Sin[-φ0-ω0 tk+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ω0 tk+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2]]}}]],
If[a==0, {},
Graphics3D[{{PointSize[0.009], Purple, Point[
Xyz[xyZ[{
Sin[-φ0-ц0 a Ξ/χ tk+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ц0 a Ξ/χ tk+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2]]}}]]],
If[crd==1, If[tk==0, {}, If[a==0, {},
ParametricPlot3D[
Xyz[xyZ[{
Sin[-φ0-ω0 tt+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ω0 tt+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2],
{tt, Max[0, tk-1/2 π/ω0], tk},
PlotStyle -> {Thickness[0.001], Dashed, Purple},
PlotPoints-> Automatic,
MaxRecursion-> mrec]]],
If[tk==0, {}, If[a==0, {},
ParametricPlot3D[
Xyz[xyZ[{
Sin[-φ0-ц0 a Ξ/χ tt+π/2] Sqrt[x0[A]^2+y0[A]^2],
Cos[-φ0-ц0 a Ξ/χ tt+π/2] Sqrt[x0[A]^2+y0[A]^2],
z0[A]}, w1], w2],
{tt, Max[0, tk-1/2 π/ω0], tk},
PlotStyle -> {Thickness[0.001], Dashed, Purple},
PlotPoints-> Automatic,
MaxRecursion-> mrec]]]],
Block[{$RecursionLimit = Mrec},
If[tk==0, {},
ParametricPlot3D[
Xyz[xyZ[{x[tt], y[tt], z[tt]}, w1], w2], {tt, If[TMax<0, Min[0, T+d1], Max[0, T-d1]], T},
PlotStyle-> {Thickness[0.004]},
ColorFunction-> Function[{x, y, z, t},
Hue[0, 1, 0.5, If[TMax<0, Max[Min[(+T+(-t+d1))/d1, 1], 0], Max[Min[(-T+(t+d1))/d1, 1], 0]]]],
ColorFunctionScaling-> False,
PlotPoints-> Automatic,
MaxRecursion-> mrec]]],
If[tk==0, {},
Block[{$RecursionLimit = Mrec},
ParametricPlot3D[
Xyz[xyZ[{x[tt], y[tt], z[tt]}, w1], w2], {tt, 0, If[Tmax<0, Min[-1*^-16, T+d1/3], Max[1*^-16, T-d1/3]]},
PlotStyle-> {Thickness[0.004], Opacity[0.6], Darker@Gray},
PlotPoints-> Plp,
MaxRecursion-> mrec]]],
ViewPoint-> {xx, yy, zz}];
Quiet[Do[
Print[Rasterize[Grid[{{
plot1a[{0, -Infinity, 0, tk, w1l, w2l}],
plot1a[{0, 0, Infinity, tk, w1r, w2r}],
display[Quiet[д[tk]]]
}, {" ", " ", " "}
}, Alignment->Left]]],
{tk, 0, TMax, TMax/1}]]
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||| 13) EXPORTOPTIONEN |||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* Export als HTML Dokument *)
(* Export["Y:\\export\\dateiname.html", EvaluationNotebook[], "GraphicsOutput" -> "PNG"] *)
(* Export direkt als Bildsequenz *)
(* Do[Export["Y:\\export\\dateiname" <> ToString[tk] <> ".png", Rasterize[...] *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* ||||||||||||||||
http://kerr.yukerez.net ||||| Simon Tyran, Vienna ||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)

 Das ist die deutschsprachige Version.
Das ist die deutschsprachige Version.  English versions are available on en.yukterez.net and yukipedia.
English versions are available on en.yukterez.net and yukipedia.











































































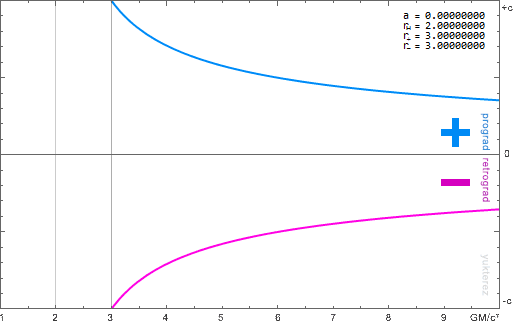
 , also der klassische Schwarzschild-Photonenkreisbahnradius (siehe
, also der klassische Schwarzschild-Photonenkreisbahnradius (siehe 


























{kind=link}
{kind=link}